编写PID程序步骤详解 (pid编程实现)

一、引言
PID(比例-积分-微分)控制器作为一种广泛应用于工业控制领域的控制算法,对于系统稳定性和性能的提升具有重要意义。
本文将详细介绍编写PID程序的步骤,帮助读者更好地理解和应用PID控制器。
二、PID控制器原理
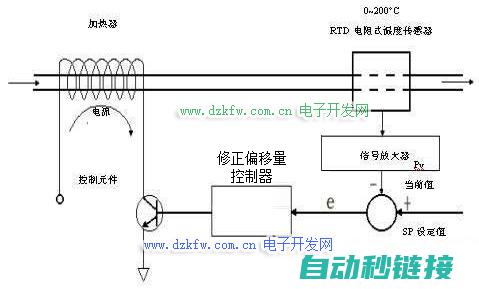
PID控制器通过比较实际输出与期望目标之间的误差,根据比例、积分和微分三种方式对误差进行计算,从而调整系统输入,使系统输出趋近于期望目标。
其中,比例项用于调整当前误差,积分项用于消除稳态误差,微分项用于抑制系统超调。
三、编写PID程序步骤
1. 初始化PID控制器参数
在编写PID程序之前,需要设定PID控制器的参数,包括比例系数(Kp)、积分系数(Ki)和微分系数(Kd)。
这些参数可根据实际系统特性和控制要求进行调整。
初始化时,可根据经验或试验确定参数值。
2. 获取实际输出和目标值
在程序中,需要实时获取系统的实际输出和目标值。
目标值是根据实际需求设定的期望输出,实际输出是通过传感器等测量设备获得的系统实时输出数据。
3. 计算误差
根据目标值与实际输出,计算误差。
误差等于目标值与实际输出之间的差值。
4. 计算PID控制器的输出
根据误差,计算PID控制器的输出。
输出值由比例项、积分项和微分项三部分组成。
具体计算公式为:
输出 = Kp 误差 + Ki 积分误差 + Kd 微分误差
其中,积分误差为过去时刻误差的累加,微分误差为误差的变化率。
5. 调整系统输入
根据PID控制器的输出,调整系统输入,使系统输出趋近于目标值。
调整幅度可根据实际需要设定。
6. 实时调整参数
在实际运行过程中,可根据系统响应情况实时调整PID控制器的参数,以获得更好的控制效果。
参数调整可采用自适应、模糊控制等方法。
四、编程实现
以下是一个简单的PID控制程序示例(以C语言为例):
1. 定义PID控制器结构体
```c
typedef struct {
floatKp; // 比例系数
float Ki; // 积分系数
float Kd; // 微分系数
float error_last; // 上一次误差值
float integral; // 积分误差
} PIDController;
```
2. 初始化PID控制器
```c
void PID_Init(PIDController pid, float Kp, float Ki, float Kd) {
pid->Kp = Kp;// 设置比例系数
pid->Ki = Ki; // 设置积分系数
pid->Kd = Kd; // 设置微分系数
pid->error_last = 0; // 初始化误差值为0
pid->integral = 0; // 初始化积分误差为0
}
```
3. 计算PID控制器输出
在主循环中,不断获取实际输出和目标值,计算误差,并根据误差计算PID控制器输出。以下是一个简化的示例:
```c
float PID_Calculate(PIDController pid, float setpoint, float actual_output) {
floaterror = setpoint - actual_output; // 计算误差
pid->integral += error; // 累加积分误差
float derivative =error - pid->error_last; // 计算微分误差(简化处理)这里的微分计算方式简化处理为只考虑当前和上一次误差之差实际情况下需要考虑一段时间内误差的变化趋势来进行更准确的计算调整比例系数、积分系数和微分系数的具体公式根据实际需求和系统特性进行调整和优化然后根据计算结果调整系统输入例如调整电机速度等以驱动系统达到目标值在实际运行过程中可以根据系统响应情况实时调整PID控制器的参数以获得更好的控制效果最终完成整个PID控制程序的编写并应用于实际系统中以实现期望的控制目标总结本文详细介绍了编写PID程序的步骤包括初始化PID控制器获取实际输出和目标值计算误差计算PID控制器输出调整系统输入以及实时调整参数等同时给出了一个简单的C语言示例程序帮助读者更好地理解PID控制器的实现过程在实际应用中需要根据具体系统和控制要求进行相应的调整和优化以实现最佳的控制效果希望本文能对读者在PID控制器的学习和实践中有所帮助
本文地址: https://uf.zdmlj.com/article/3e8887a1ea8ae66929aa.html


晶晶床垫,中国最早的床垫企业之一,经过38年的发展现已成为云南昆明一家大型家具企业。专业提供酒店专用床垫、山棕床垫、席梦思弹簧床垫、进口乳胶床垫及各类软体家具的解决方案。

沈阳希泰商贸有限公司

创新场景化金融解决方案服务商

该站点未添加描述description...

青云在线翻译网,提供英语,荷兰语,法语,德语,希腊语,意大利语,日语,韩语,葡萄牙语,俄语,西班牙语的免费在线翻译服务。

【昆山弱电公司】昆山弱电工程【诺舟信息科技】,致力于昆山及周边地区的弱电工程、网络工程,监控工程,安防监控,网络监控,门禁系统,电脑维护外包,综合布线等服务。公司承接昆山弱电工程同时为昆山及周边地区多家企业提供昆山安防监控,昆山网络监控,昆山防盗报警,昆山综合布线服务,昆山安防监控,昆山网络监控服务热线:0512-57702362 13306264829

红衫倩影心理咨询工作室,首家互联网线上心理咨询工作室,红衫倩影,24小时提供免费图文咨询、电话倾诉和心理测试,专注为985、211大学毕业生、娱乐圈艺人、公务员、教师、护士、创业者、新手心理咨询师群体提供职业规划、婚姻情感、亲子教育咨询;

苏州华鼎铜业有限公司位于交通便捷、经济发达、风景优美、自然环境得天独厚的江南吴越古镇――木渎。企业现有员工15人、占地面积1200O。主要经营各类铜板、带材、牌号。主要有H62、H65、H68、H70、T2、3等系列,C5191、C5210。公司现有分条机、覆膜机,全自动电脑锯床。主要销售铍铜、纯红铜、铬铜、钨铜、锡磷青铜带、锌白铜带等产品。

桥梁伸缩缝厂家衡水焱烨工程橡胶有限公司主营产品:桥梁伸缩缝,gqf桥梁伸缩缝,C40型桥梁伸缩缝,C60型桥梁伸缩缝,桥梁板式橡胶支座,gyz桥梁板式橡胶支座,gjz桥梁板式橡胶支座等

和族科技

南航北骑网



文章标题,可能的表现症状及其相关疾病解析一、引言在日常生活中,我们可能会遇到各种各样的身体不适或异常表现,这些症状可能是某种疾病的预兆,也可能是由于其他因素引起的,了解这些可能的表现症状,对于及时发现并处理潜在的健康问题具有重要意义,本文将详细介绍一些常见的可能表现症状及其相关的疾病,并探讨这些症状与潜在疾病之间的联系,二、常见的可能...。

从安装到操作全方位解析,安装操作系统的方法及过程一、引言随着科技的快速发展,计算机操作系统已成为我们日常生活和工作中不可或缺的一部分,无论是个人计算机、服务器还是移动设备,安装和操作操作系统都是使用这些设备的基础,本文将为您详细介绍从安装操作系统到日常操作的全过程,帮助您更好地理解和运用计算机操作系统,二、操作系统的安装1.安装前的准...。
从基础到高级,一站式掌握电气元件图符号知识一、引言在现代电气工程中,掌握电气元件图符号知识是必不可少的基本技能,从电路设计到系统维护,从初学者到资深工程师,都需要熟悉并正确应用各种电气元件的图符号,本文将带领读者从基础到高级,一站式掌握电气元件图符号知识,二、电气元件图符号基础知识1.电气元件简介,了解电阻、电容、电感、开关、继电器、...。

机器人零点复归的概念解析,机器人零点复位,一、引言随着科技的飞速发展,机器人技术已成为现代工业生产中不可或缺的一部分,在机器人的运行过程中,为了确保精准度和稳定性,零点复归,或称零点复位,的概念显得尤为重要,本文将对机器人零点复归的概念进行解析,帮助大家更好地理解其在机器人技术中的应用,二、机器人零点复归的基本概念1.定义,机器人零点...。

寻求解决方案,保障工业设备的正常运行一、引言在工业领域中,设备的正常运行对于生产流程的顺畅进行至关重要,由于设备故障、操作不当、维护不足等原因,工业设备的正常运行时常面临挑战,针对这些问题,本文旨在探讨解决方案,以确保工业设备的稳定运行,提高生产效率,降低生产成本,二、工业设备面临的问题1.设备故障设备故障是工业设备运行中常见的问题,...。

三、如何选择和定制适合自己的安川机器人PPT背景套,探索最佳策略,3,3选择法,一、引言在现代商业环境中,PPT已成为我们展示信息、交流思想的重要工具,特别是在介绍安川机器人这一高科技产品时,一个美观且专业的背景套件对于提升展示效果至关重要,本文将为你详细介绍如何选择和定制适合自己的安川机器人PPT背景套,并引出,3,3最佳选择法,,...。

掌握变频器维修技术,保障工业生产稳定运转的重要一环一、引言随着工业自动化的不断发展,变频器在工业生产中的应用越来越广泛,变频器作为电机驱动的核心设备,其性能的稳定与否直接关系到生产线的正常运转,因此,掌握变频器维修技术,对于保障工业生产的稳定运转具有重要意义,本文将详细介绍变频器的概念、作用、常见故障及维修技术,以帮助读者更好地了解和...。
电路设计步骤解析,组合逻辑电路设计详解一、引言在当今高度依赖电子技术的时代,电路设计作为电子工程领域的重要组成部分,其地位日益凸显,组合逻辑电路设计作为电路设计的一种重要类型,广泛应用于通信、计算机、自动化等各个领域,本文将详细介绍组合逻辑电路设计的步骤,帮助初学者及专业人士更好地理解和掌握电路设计技巧,二、组合逻辑电路设计概述组合逻...。

掌握PLC计算程序的关键步骤和技巧,PLC必备基础知识一、引言在现代工业控制系统中,可编程逻辑控制器,PLC,扮演着至关重要的角色,PLC是一种数字计算机,主要用于控制工业机械或制造过程,掌握PLC计算程序的关键步骤和技巧是每个工程师和自动化专业人士必备的基本知识,本文将详细介绍PLC的基本原理、程序结构、编程语言和掌握PLC计算程序...。

掌握编程基础,打造你的技术生涯的重要基石随着信息技术的快速发展,编程已成为当今社会中不可或缺的技能之一,掌握编程基础不仅能帮助我们在职场中脱颖而出,还能为我们的个人发展开辟新的道路,本文将探讨掌握编程基础的重要性,介绍如何开始学习编程,提供一些有用的学习资源,并强调持续学习和实践的重要性,一、掌握编程基础的重要性在当今数字化时代,编程...。

伺服大泵活塞的性能特点与技术优势,伺服泵控技术,一、引言随着工业自动化水平的不断提高,伺服系统在各类设备中的应用越来越广泛,伺服大泵作为伺服系统中的重要组成部分,其性能优劣直接影响到整个系统的运行效率与稳定性,活塞作为伺服大泵的核心部件,其性能特点与技术优势更是备受关注,本文将详细介绍伺服大泵活塞的性能特点与技术优势,帮助读者更好地了...。
文章题目,详解衔接、登录与验证步骤随着科技的提高,无论是日经常常使用智能手机、电脑,还是访问各类在线服务,咱们总会遇到衔接、登录与验证的步骤,本文将为您详细解析这一环节,一、衔接步骤1.网络衔接在设施,如手机、电脑,与网络之间的衔接,理论首先须要经过无线或有线的方式衔接到路由器或基站,关于无线网络,设施会搜查可用的Wi,Fi网络或蜂窝...。

文章标题,解析PLC程序逻辑与幼儿园家园沟通的技巧策略一、PLC程序逻辑解析PLC,可编程逻辑控制器,是现代工业自动化的核心组成部分,广泛应用于制造业、能源、交通等领域,PLC程序逻辑是PLC实现控制功能的基础,其解析和理解对于自动化工程师及技术人员来说至关重要,本文将简要解析PLC程序逻辑的主要方面,1.PLC程序结构PLC程序通常...。

PLC程序中的数据块概览一、引言PLC,可编程逻辑控制器,程序中的数据结构对于实现自动化控制至关重要,数据块是PLC程序中用于存储各种数据信息的核心部分,它们包含程序运行时所需的变量、参数等,了解PLC程序中的数据块结构,有助于更好地理解和优化PLC程序的性能,本文将详细介绍PLC程序中的数据块概览,以及PLC程序中所使用的变量分类,...。

文章标题,快速掌握计数功能应用——所学知识应用攻略引言在现代社会,掌握计数功能应用已经成为我们日常生活和工作中不可或缺的技能,无论是商务人士、学生还是普通消费者,计数功能都能帮助我们提高效率,解决实际问题,如何快速掌握计数功能应用并非易事,本文将为您详细阐述如何快速掌握所学知识并将其应用于计数功能中,助您轻松应对各种场景,一、了解计数...。

发那科机器人遭遇监视器异常情况,专业解析与售后服务支持一、引言随着工业自动化水平的不断提高,发那科机器人在工业生产线上扮演着越来越重要的角色,任何机械设备在使用过程中都可能出现故障或异常情况,本文将重点讨论发那科机器人在运行过程中遭遇监视器异常情况的问题,并介绍相应的解决方案和发那科机器人售后服务电话的重要性,二、发那科机器人监视器异...。

深入了解Smart程序,世情党情国情社情民情的智能化强化分析一、引言随着信息化时代的到来,大数据、人工智能等技术在社会各个领域发挥着越来越重要的作用,在此背景下,Smart程序作为一种集成了人工智能、数据分析等技术的新型应用,对于深入了解世情党情国情社情民情具有重大意义,本文将围绕Smart程序展开深入探讨,分析其在强化世情、党情、国...。
